


工业人工智能:抓东西这件“小事”
来源:乐鱼网.com 发布时间:2024-09-30 16:35:11

来源:乐鱼网.com 发布时间:2024-09-30 16:35:11
“经过35年人工智能的研究,人们学到的重要一课是:困难的问题是简单的,简单的问题是困难的。”
在工业领域,有一个“简单”的问题着实令人困扰 抓东西。

当下,线上购物成为常态,各类电商蒸蒸日上,购物狂欢节之下的包裹数量更是惊人。国家邮政局监测数据显示,截至2023年6月24日,今年全国快递业务量已达600亿件,比2019年达到600亿件提前了172天,比2022年提前了34天。
种类繁多、形状各异的物品聚集在一起,幕后则是成千上万的工作人员进行分拣、打包、搬运等工作,库房里的繁忙景象可想而知。
能否借助科技的力量为人们减轻一些负担呢?答案是肯定的。比如,堪称“仓库搬运效率神器”的AGV小车能代替人工快速搬运物品,在智慧仓储领域得到普遍应用。

上海西门子开关有限公司(SSLS)的机器人搬运系统是工厂智能物流及仓储管理的重要一环。
虽然搬运工作已经逐渐自动化,但是分拣仍旧是劳动密集型的作业,不仅需要大量员工,而且耗时特别长。
你可能会问,分拣不过是将相应的物品抓起来再重新放下去,这么简单的动作为什么不能自动化呢?原因就在于人类大脑的复杂性。就抓东西这件“小事”来说,人脑会快速识别不同物体的抓取点,而机器人却不具备这样的认知能力。
如果说机械臂是工业机器人的“手臂”,使其可以有效的进行抓取动作;那么相机则是“眼睛”,让机器人基于视觉技术对物体进行识别与跟踪,实现“手眼协同”。然而,机器人缺乏自主思考的“大脑”,无法在混杂遮挡的环境中自主调整抓取策略,进行无序分拣。即使通过创建既定程序,工业机器人也只能识别“已知”物品的抓取点,也就是摆放固定、形状确定的物体。
事实上,不仅在物流行业,在各行各业的库房里、产线上,无序分拣任务随处可见,且90%以上还需依赖人工完成,成本自然降不下来。

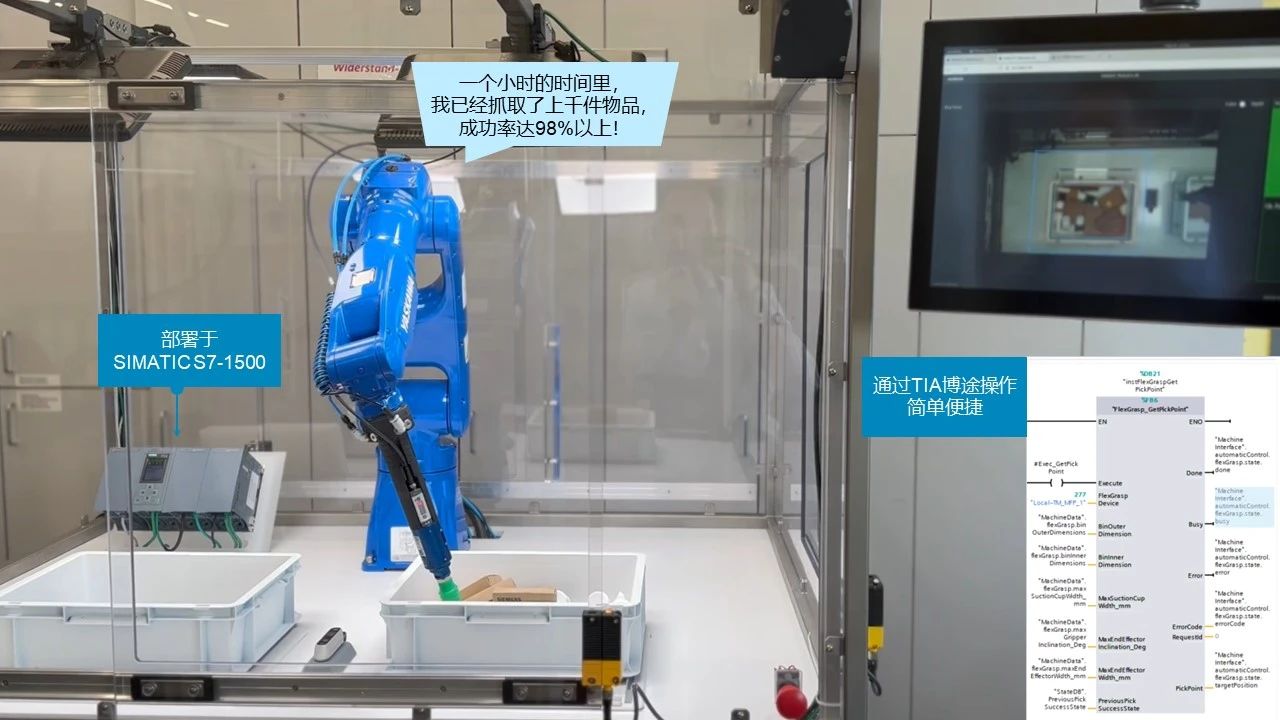
对此,西门子工厂自动化事业部的同事们提出了创新技术路线:让AI学习海量物体的基础几何特征。这有别于传统点到点示教的抓取方案以及基于产品外观模板匹配的抓取方案,能够让系统从根本上学会“抓取”这一技能,实现“零训练”即插即用。西门子深度学习视觉软件SIMATIC Robot Pick AI应运而生。它可搭配任意机械臂和工业相机,使工业机器人轻松 “拿捏” 堆叠混乱、结构多样的物体,实际做到无序抓取!

SIMATIC Robot Pick AI具有开放性、模块化和简易化的特征。用户无需进行模型匹配,无需手动训练数据,拿来即用,智能系统能够在运作时的状态下实时识别抓取点。不仅如此,系统还可以与SIMATIC系列新产品以及TIA博途软件完美兼容,只需十分钟,轻松安装!
SIMATIC Robot Pick AI,快速实现灵活、准确、高效的无序抓取与分拣。
机器人抓东西这件“小事”对工业未来的意义重大,不但可以提到效率和准确率,更能把大量工作人员从高强度的重复性劳动中解放出来。随着老龄化加剧、劳动力短缺,这件“小事”还将释放更大潜能,让科技服务于人类,让人类工作更具价值!
▪ 西门子 Simcenter Testlab 更新,增强协同能力,减少原型依赖
▪ 西门子Mobile Worker Lite获2024CIIF人机一体化智能系统奖
▪ 2024年CIMC“西门子杯”中国智能制造挑战赛全国总决赛在湖州举行
▪ 2024世界机器人大会闭幕:头部企业加速构建产业生态 行业发展仍需跨越鸿沟
▪ 调查报告:制造商在AI应用方面领先,超六成预估仅需11个月就可以实现AI目标
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 乐鱼网.com-乐鱼网官方-乐鱼网最新版下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载
鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载